เรดาร์ (RADAR)
เรดาร์ (RADAR)
เรดาร์ได้พัฒนาขึ้นระหว่างสงครามโลกครั้งที่ 2 เพื่อตรวจหาตำแหน่งและเส้นทางของเครื่องบินจากสถานีภาคพื้นดิน
และใช้ในการนำทางในสภาพอากาศที่ไม่ดี RADAR ย่อมาจาก “Radio
Detection And Ranging”เรดาร์เป็นระบบการตรวจวัดที่ต้องมีแหล่งของพลังงานที่มนุษย์สร้างขึ้น
และส่งสัญญาณในช่วงคลื่นไมโครเวฟไปยังวัตถุเป้าหมายแล้ววัดความเข้มข้นของพลังงานที่กระจัดกระจายกลับ
(Backscatter) ไปสู่เครื่องรับรู้ ซึ่งเป็นระบบการรับรู้แบบแอ็กทิฟ
ดังนั้นการรับรู้หรือได้มาซึ่งภาพจากเรดาร์จึงสามารถถ่ายภาพได้ทั้งกลางวัน
และกลางคืน ในทุกสภาพอากาศ ทะลุทะลวงเมฆได้
ระบบเรดาร์ถ่ายภาพในแนวเอียงซึ่งใช้สายอากาศที่ติดตั้งเชื่อมประจำที่บนเครื่องบินโดยชี้ไปทางวัตถุเป้าหมาย
เรียกว่า เรดาร์มองข้าง (Side-Looking Radar : SLR หรือ Side-Looking
Airborne : SLAR) ความละเอียดของเรดาร์ขึ้นอยู่กับขนาดของสายอากาศ ระบบเรดาร์จากห้วงอวกาศเริ่มขึ้นเมื่อปี
ค.ศ. 1978 เมื่อสหรัฐอเมริกาได้ส่งดาวเทียม SEASAT และหลังจากนั้นก็มีการศึกษาระบบเรดาร์จากห้วงอวกาศโดยกระสวยถ่ายภาพจากเรดาร์
(Shuttle Imaging Radar : SIR) ต่อเนื่องตั้งแต่ปี ค.ศ. 1980 นอกจากนี้ได้มีการพัฒนาระบบเรดาร์บนดาวเทียมเรื่อยมาจนถึงปัจจุบัน
เช่น ดาวเทียม ERS JERS ENVISAT RADARSAT และ ALOS เป็นต้น
ระบบการถ่ายภาพเรดาร์ประกอบด้วย เครื่องส่งสัญญาณ (Transmitter)
เครื่องรับสัญญาณ(Receiver)
อุปกรณ์อิเล็กทรอนิกส์
และคอมพิวเตอร์ เพื่อประมวลผลและบันทึกข้อมูล เครื่องส่งสัญญาณส่งพัลส์ของพลังงานไมโครเวฟเป็นช่วงเท่าๆ
กัน และปรับระยะโดยจานตั้งฉากกับทิศทางคลื่นที่ลงสู่เป้าหมายเป็นมุมเอียง
เมื่อคลื่นเรดาร์กระทบกับเป้าหมายสัญญาณจะกระจัดกระจายกลับไปยังเครื่องรับสัญญาณ
ข้อมูลที่กระจัดกระจายกลับในแต่ละครั้ง ความเข้มของสัญญาณ เวลา และมุมที่ตกกระทบเป้าหมาย
ที่ได้รับจากระบบรับรู้จะถูกคำนวณเพื่อบอกตำแหน่งของวัตถุเป้าหมาย
ภาพเรดาร์ที่ประมวลผลจะเป็นความเข้ม (Strength) ของสัญญาณกลับซึ่งเป็นระดับความสว่างของภาพ

ภาพแสดงพื้นฐานของภาพเรดาร์
ที่มา
: Lillesand, T.M. and Kiffer, R.W. (1994)

ภาพแสดงพื้นฐานของภาพเรดาร์
ที่มา : Lillesand, T.M. and Kiffer, R.W. (1994)
ที่มา : Lillesand, T.M. and Kiffer, R.W. (1994)
การถ่ายภาพในแนวเอียงดังภาพเป็นแนวที่ตั้งฉากกับทิศทางการบิน
ซึ่งเรียกว่า ทิศทางพิสัย (Range direction) ส่วนทิศทางของการบินเรียกว่า
ทิศทางแอซิมัท (Azimuth direction) ดังนั้นความละเอียดของเรดาร์จึงประกอบด้วย 2
ทิศทาง
ในบทนี้มีวัตถุประสงค์หลักเพื่อที่จะนำเสนอภาพรวมของหลักการเบื้องต้นของเรดาร์
ซึ่งใช้เป็นพื้นฐานในการเข้าใจระบบเรดาร์และปฏิสัมพันธ์เบื้องต้นของเรดาร์กับวัตถุเป้าหมายอย่างย่อ
อันเป็นแนวทางที่จะศึกษาในรายละเอียดต่อไป เพราะในปัจจุบันข้อมูลจากดาวเทียมสำรวจโลกไม่ว่าจะเป็นข้อมูลจากดาวเทียม
RADARSAT และ ALOS เป็นข้อมูลด้านระบบรับรู้แบบแอ็กทิฟ
ถ้าหากปราศจากความรู้ความเข้าใจระบบเรดาร์ และปฏิสัมพันธ์ระหว่างคลื่นเรดาร์
แล้วการแปลตีความภาพจะไม่มีความถูกต้องเลย
อย่างน้อยในส่วนนี้จะเป็นช่องทางหนึ่งที่ผู้สนใจมีความรู้พอสมควร
ดังนั้นการนำเสนอในที่นี้จะแบ่งเป็น 2 เรื่องหลัก คือ พารามิเตอร์ของระบบ (System
parameters) และพารามิเตอร์ด้านสิ่งแวดล้อมหรือพื้นที่เป้าหมาย (Environment/
Target parameters)
สมการเรดาร์ (RADAR equation)

ภาพสมการเรดาร์
PR = พลังงานทั้งหมดที่รับ (Total power received)
PT = พลังงานที่ส่งออก (Power transmitted)
σ0 = การกระจายเรดาร์ต่อหน่วยพื้นที่ หรือสัมประสิทธิ์การกระจัดกระจาย (Radar
scatter coefficient)
A = พื้นที่หน้าตัด (RADAR cross section)
G = อัตราการขยายจากสายอากาศ (Antenna gain)
R = ระยะทางแนวพิสัย (Range)
λ = ช่วงคลื่น (Wavelength)
จากสมการจะเห็นได้ว่ามีปัจจัยหลักที่ส่งผลต่อความเข้มของพลังงานที่กระจัดกระจายกลับ
คือ พลังงานที่ส่งออกความยาวคลื่น ขนาดของสายอากาศรับสัญญาณ เรขาคณิตของการถ่ายภาพ
เช่น ความกว้างของลำแสงมุมตกกระทบ และระยะทาง เป็นต้น
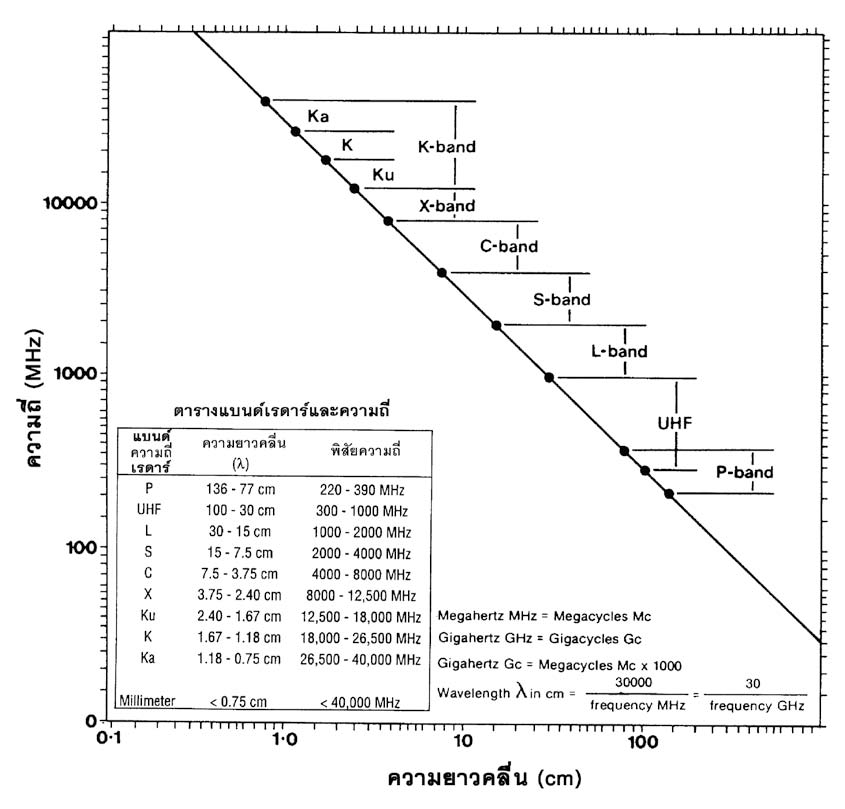
สเปกตรัมแม่เหล็กไฟฟ้าช่วงคลื่นเรดาร์
ช่วงคลื่นเรดาร์เป็นช่วงคลื่นที่สูงกว่าคลื่นแสงสว่างและคลื่นความร้อน
ซึ่งในทางเทคโนโลยีการรับรู้จากระยะไกล อยู่ระหว่าง 1 มิลลิเมตร ถึง
1 เมตร ซึ่งเป็นช่วงคลื่นไมโครเวฟ (ภาพที่ 3.58) และมักนิยมใช้ตัวอักษรที่เป็นมาตรฐานบอกช่วงคลื่น
ตามภาพ เรียงลำดับจากสั้นไปยาว คือ แบนด์ Ka K Ku X C S L UHF และ P ซึ่งได้แสดงความสัมพันธ์ระหว่างแบนด์ต่าง ๆ กับความยาวคลื่นและความถี่

ภาพสเปกตรัมแม่เหล็กไฟฟ้า

ภาพแสดงความยาวคลื่น ความถี่ และตัวอักษรแบนด์เรดาร์
ที่มา
: Henderson, F.M. and Lewis, A.J. (1998)
โพลาไรเซชัน (Polarization)
โพลาไรเซชัน หมายถึง ทิศทางการแผ่กระจายของสนามแม่เหล็กไฟฟ้าของคลื่นแม่เหล็กไฟฟ้า
ซึ่งจะมีการกระจายทั้งแนวตั้งและแนวนอนโดยระบบเรดาร์สามารถที่จะส่งหรือรับสัญญาณคลื่นแม่เหล็กไฟฟ้าในทิศทางการแผ่กระจายทั้งแนวตั้ง
(Vertical : V) และแนวนอน(Horizontal : H) เมื่อส่งคลื่นแม่เหล็กไฟฟ้าในทิศทางการแผ่กระจายทางแนวนอน
(H) และรับคลื่นการแผ่กระจายในแนวนอน (H) จะใช้สัญลักษณ์
HH ในทำนองเดียวกันก็มีการรับส่งเป็น HV VH และ VV
ในทิศทางการแผ่กระจาย
ทั้งนี้ปฏิสัมพันธ์ระหว่างคลื่นเรดาร์กับวัตถุสำหรับโพลาไรเซชันที่ต่างกันจะไม่เหมือนกันขึ้นอยู่กับคุณสมบัติของวัตถุ

ภาพโพลาไรเซซัน
พิสัยและแอซิมัท (Range and Azimuth)
การถ่ายภาพเรดาร์เป็นแบบระบบการถ่ายด้านข้างและจะสะสมข้อมูลไปอย่างต่อเนื่อง
มิติของการถ่ายภาพที่มีทิศทางไปตามแนวการบิน เรียกว่า แอซิมัท
มิติของการถ่ายภาพที่ขวางแนวการบิน เรียกว่า พิสัย ขอบภาพที่ใกล้จุดตรงใต้เรดาร์
เรียกว่า ขอบพิสัยใกล้ (Near range edge) ส่วนขอบภาพที่ไกล เรียกว่า ขอบพิสัยไกล (Far
range edge)

ภาพเรขาคณิตของเรดาร์จากเครื่องบิน
ความละเอียด
ความละเอียด หมายถึง
ความสามารถของระบบที่จะแยกจากกันระหว่างวัตถุสองอย่างที่ใกล้กันในระบบเรดาร์
ความละเอียดจะกำหนดทั้งทิศทางตามพิสัย (ขวางแนวโคจร) และทิศทางตามแอซิมัท
(ตามแนวโคจร) โดยมีรายละเอียดบางประการดังนี้
ทิศทางพิสัย
- ความละเอียดตามแนวพิสัยของเรดาร์ช่องเปิดสังเคราะห์ (Synthetic
Aperture Radar : SAR) ถูกกำหนดโดยเครื่องเรดาร์ที่สร้างขึ้นและหน่วยประมวลผล- ความละเอียดขึ้นอยู่กับความยาวของพัลส์
ความยาวพัลส์ที่สั้นจะให้ความละเอียดดีขึ้น-
ข้อมูลเรดาร์จะถูกสร้างขึ้นจากข้อมูลที่ได้รับในแนวของพิสัยเอียง (Slant
range) แต่เมื่อทำภาพจะถูกฉายลงในแนวพิสัยราบ (Ground range)
ทิศทางแอซิมัท
- ความละเอียดตามแอซิมัทถูกกำหนดโดยความกว้างของมุมลำแสงของแนวพื้นที่-
วัตถุที่อยู่ใกล้กันสามารถแยกจากกันได้
จะต้องมีระยะทางในแนวแอซิมัทยาวกว่าความกว้างของลำแสงบนพื้นดิน-
เรดาร์ช่องเปิดสังเคราะห์ได้ชื่อจากกระบวนการวิเคราะห์ทางตามแนวโคจร
และต้องมีความละเอียดตามแนวโคจร น้อยกว่าความกว้างของลำแสง (Beam width) ที่ส่งออกจากสายอากาศส่งสัญญาณ
ความละเอียดของภาพเรดาร์กำหนดทั้งในทิศทางตามแนวโคจร
และตามแนวความกว้างหรือขวางแนวโคจร
โดย rR = ความละเอียดตามแนวพิสัย
rA = ความละเอียดตามแนวแอซิมัท

ภาพเซลล์ความละเอียด (Resolution cell)
ความสัมพันธ์ระหว่างมุมตกกระทบ (Incident angle) มุมก้ม (Depression angle) และมุมมอง (Look angle)
มุมตกกระทบ (θ) หมายถึง
มุมระหว่างคลื่นเรดาร์ที่ตกกระทบกับแนวดิ่งของพื้นผิวโลก
มุมก้ม (β) หมายถึง
มุมระหว่างแนวนอนกับแนวคลื่นเรดาร์
มุมมอง (ø) หมายถึง
มุมระหว่างแนวดิ่งกับคลื่นเรดาร์

ภาพแสดงความสัมพันธ์ระหว่างมุมมอง (ø) มุมก้ม (β)
และมุมตกกระทบ
(θ) เมื่อพื้นโลกเรียบ
มุมตกกระทบเฉพาะที่ (Local incident angle : LIA)
มุมตกกระทบเฉพาะที่ หมายถึง มุมระหว่างคลื่นเรดาร์ ที่ตกกระทบกับแนวตั้งฉากกับความลาดชันของพื้นที่ในกรณีที่พื้นที่มีความลาดชัน

ภาพ (ก) แสดงแบบจำลองระบบ (ข) มุมตกกระทบเฉพาะที่
พิสัยตามแนวเอียงและตามแนวราบ (Slant range and Ground range)
ตรงกันข้ามกับเครื่องวัดเชิงแสง (Optical sensor) เรดาร์จะถ่ายภาพในแนวเอียง
ซึ่งเป็นที่ทราบกันดีว่าเป็นทิวทัศน์แนวเฉียง (Oblique perspective) การถ่ายภาพในลักษณะเช่นนี้เพื่อที่จะส่งพัลส์ให้มีปฏิสัมพันธ์กับพื้นผิวโลกในระยะที่เพิ่มขึ้นจากสายอากาศเรดาร์
และได้พิสัยหรือระยะทางของภาพ พิสัยตามแนวเอียงเป็นระยะทางระหว่างเรดาร์กับหน่วยการสะท้อนบนพื้นผิว
ซึ่งเป็นการวัดเวลาจากการส่งสัญญาณแรกจนกระทั่งรับสัญญาณกลับสู่เครื่องรับรู้
ข้อมูลดิบของเรดาร์ที่ทำการเก็บข้อมูลตามพิสัยแนวเอียง
ซึ่งสามารถคำนวณได้จากความสัมพันธ์

SR = พิสัยตามแนวเอียง
c = ความเร็วของแสง
t = เวลาระหว่างการส่งพัลส์
และรับสัญญาณกลับ
ผู้ใช้ต้องการข้อมูลที่แสดงข้อมูลตามแนวราบมากกว่าแนวเอียง
ระยะทางตามแนวราบเรียกว่าพิสัยตามแนวราบ ซึ่งสามารถคำนวณเมื่อทราบมุมตกกระทบ (θ)
ดังนี้

การประมวลผลภาพเรดาร์จึงจะต้องปรับแก้ข้อมูลในพิสัยตามแนวเอียง
มาเป็นพิสัยตามแนวราบ
เรดาร์ช่องเปิดจริงและเรดาร์ช่องเปิดสังเคราะห์ (Real and Synthetic Aperture Radars : RAR and SAR)
ในช่วงเริ่มต้นการถ่ายภาพเรดาร์
ระบบเรดาร์เป็นการถ่ายภาพในแนวเฉียงจะเป็นเรดาร์ช่องเปิดจริงซึ่งมีสายอากาศ
หรือจานรับส่งสัญญาณแบบติดแน่นบนเครื่องบิน
การพัฒนาให้ได้ความความละเอียดดีขึ้นต้องมีสายอากาศขนาดใหญ่ และความยาวคลื่นลดลง
ดังนั้นจึงเป็นปัญหาและอุปสรรคในการถ่ายภาพเรดาร์เป็นอย่างมากต่อมาได้มีการพัฒนาเรดาร์ช่องเปิดสังเคราะห์ขึ้นทำให้ลดปัญหาได้มาก
ความแตกต่างของระบบเรดาร์ทั้งสองประเภทคือ วิธีการได้มาซึ่งความละเอียดด้านแอซิมัท
(Azimuth resolution) ในการถ่ายภาพเรดาร์ไม่ว่าแบบใดความละเอียดในแนวพิสัยเอียงจะเหมือนกัน
ส่วนความละเอียดในแนวแอซิมัทหรือแนวการบินจะแตกต่างกันระหว่างเรดาร์ช่องเปิดจริงกับเรดาร์ช่องเปิดสังเคราะห์
เรดาร์ช่องเปิดจริงรับสัญญาณในแนวแอซิมัทขึ้นอยู่กับขนาดของสายอากาศ
หากต้องการความแยกชัดที่ละเอียดต้องใช้สายอากาศความมีขนาดใหญ่ขึ้น ส่วนระบบ SAR
อาศัยการเคลื่อนที่ต่อเนื่องของสายอากาศและเก็บข้อมูลเป้าหมายหนึ่งๆ
สะสมต่อเนื่องตามเวลาที่กำหนด แล้วจึงประมวลผลเพื่อกำหนดความละเอียดและใน SAR
จะสังเคราะห์ความกว้างของลำแสงที่แคบ
ดังนั้นระบบ SAR จะใช้สายอากาศสั้น และสามารถใช้ช่วงคลื่นที่ยาวขึ้นได้ ทำให้มีความละเอียดดีขึ้น

ภาพเรดาร์ช่องเปิดจริงและเรดาร์ช่องเปิดสังเคราะห์
ที่มา
: Henderson, F.M. and Lewis, A.J. (1998)
การย่นระยะของภาพเรดาร์ (Foreshortening)
ลักษณะการย่นระยะในภาพเรดาร์คือ
ปรากฏการถ่ายภาพที่เกิดขึ้นเมื่อวัตถุบนพื้นที่ในทิวทัศน์ที่มีความลาดเอียงหันหน้าเผชิญหน้าเรดาร์ได้ภาพหดสั้นกว่าความเป็นจริง
ในลักษณะของการย่นระยะนี้คลื่นเรดาร์จะชนฐานของพื้นที่ก่อนส่วนยอด
ลักษณะการย่นระยะจะได้ภาพสว่างกว่า
การย่นระยะสูงสุดเมื่อความลาดชันของพื้นที่ตั้งฉากกับลำแสงของเรดาร์ในกรณีนี้มุมตกกระทบเฉพาะที่จะมีค่าเป็น
0 ผลก็คือทั้งส่วนยอดและส่วนล่างของพื้นที่จะถูกบันทึกภาพพร้อมกัน
ดังนั้นจะมีตำแหน่งที่เดียวกัน สำหรับความลาดชันหนึ่งๆ
ที่กำหนดให้ผลของการย่นระยะจะลดลงเมื่อเพิ่มมุมตกกระทบ
ซึ่งมุมตกกระทบเฉลี่ยเข้าใกล้ 90 ํ ผลการย่นระยะจะถูกลบไปแต่จะปรากฏเงาแทนที่
ในการเลือกมุมตกกระทบมักจะมีการแลกเปลี่ยนหรือแทนที่กัน
ระหว่างการปรากฏเงาและการย่นระยะ

ภาพการย่นระยะ
อ้างอิง
1. ตำราเทคโนโลยีอวกาศและภูมิสารสนเทศศาสตร์


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ความคิดเห็น
แสดงความคิดเห็น